- HSC Level 2/3 Unit 012 Assignment: Care Worker Responsibilities and Ways of Working
- CIPD Level 5HR03 Assignment: Understanding Reward Approaches and Their Impact on Performance and Contribution
- CIPD level 5HR02 Assignment: Talent Management and Workforce Planning Unit Guide
- Level 3 D/615/3823 Assignment: Regulation, Protection, and Collaborative Practice in Health and Social Care
- PGM216D Assignment: Bicycle Store Sales Management Application
- MATH6033 Assignment: Epidemiological Investigation of Cardiovascular Health and Tea Consumption Risks
- EH6147 Assingment: Stakeholder Analysis for Quality Improvement in Hand Hygiene Compliance
- Assignment: Investigation of Solution Concentration Through Standard Preparation, Titration, and Colorimetry Techniques
- MATH6033 Assignment: Cardiovascular Risk and Tea Drinking: Epidemiological Analyses
- CIPD level 3 3CO03 Assignment: Core behaviours for people professionals
- DAC4B1: Personal development in adult care settings
- Unit 19 Research Project Assignment 1: Impact of Corporate Social Responsibility on Business Success & Community Wellness
- EG5022 Assignment: Georeferencing and Accuracy Assessment of a Quarry 3D Model Using Photogrammetric GCPs
- Assignment: Financial Performance and Strategic Analysis of a UK Listed Company: A CORE Evaluation and Reflective Review
- 5CNMN002W Assignment: Advanced measurement- Major measurement taking off
- K/650/2298 Level 3 Understanding Roles, Responsibilities, and Effective Partnerships in Health and Social Care
- Understanding Information and Knowledge Management in the Workplace: A Briefing for HR Professionals
- HRM7010D Strategic Use of People Analytics in Enhancing Organisational Value and Agility
- TOWN1060 Urban Planning in the UK History Sustainable Design and Future City Development
- OTHM Level 5: J/650/1143 Research Methods in Health and Social Care
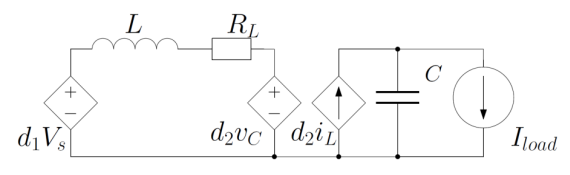
Derive and write the averaged model of the DC-DC Buck-Boost converter, as described in Figure: Intelligent Systems & Control Assignment, DMU, UK
| University | De Montfort University (DMU) |
| Subject | Intelligent Systems & Control |
Questions:
Part A:
- Derive and write the averaged model of the DC-DC Buck-Boost converter, as described in Figure. Consider as the measured output of the system the output voltage, equivalently, the voltage of the capacitor C).

- Linearise the model around the equilibrium point xeq=[20 0.4]T and derive the linearised state space representation.
- Provide several simulations of the averaged, nonlinear model and the linearised model you have acquired from questions 1 and 2 around the equilibrium point. Start by having as the initial condition the equilibrium point, and gradually use initial conditions that are farther away from it. You can use as constant input the input vector corresponding to the equilibrium point. Plot the time responses of the states for the two models against each other. Also, plot the trajectories of each model in the state space. Observe and report the differences, if any.
- Assuming a zero-order-hold discretization scheme, derive the discretized system from the linearised system, for a sampling period T=10μsecs. Compare the discretized version with the continuous-time system in a simulation, where the discretized system and the continuous-time linearised system are plots in the same figure.
- Compare also the state coming from the discrete approximation using Euler forward difference acting on the nonlinear system, i.e., by setting
Part B:
- Is the linearised continuous system controllable?
- Using the continuous-time linearised model, develop a stabilizing state space control law that drives the system to the equilibrium point. The closed-loop system must have a damping factor ζ=0.86 and a damped natural frequency ωd=2000.
- Simulate the open-loop linearised system and the closed-loop linearised system, and the closed-loop averaged system, for two initial conditions and observe/highlight the differences in the responses. Justify your choice of initial conditions.
Part C:
- The inductor current iL cannot be measured accurately without an expensive sensor. Thus, the controller designed in Part B cannot be implemented without an additional cost. To avoid this, we can develop an observer that estimates both states of the linearised system. Choose the eigenvalues of the closed-loop error dynamics of the observer and justify your decision.
- Write down the complete observer equation, that is the closed-loop error dynamics and the state estimate dynamics.
Part D:
- Consider the controller designed in Part B, which uses the state estimation instead of the actual states, as designed in Part C. Derive the resulting closed-loop system and write down the state equations and output equations. Is the resulting closed-loop system stable and why?
- Simulate two closed-loop systems with the controller designed in Part B by (i) taking the actual state as feedback and (ii) taking the state estimation as feedback. Observe differences if any.
Do You Need Assignment of This Question
Struggling to craft a unique and compelling case study? Students Assignment Help UK has the solution – a team of experienced, qualified assignment writers UK! They are ready to provide top-notch CIPD assignment assistance that will help you achieve your desired marks at an affordable price. Get ahead and make sure your work stands out from the rest – hire our experts today!
Answer